 Google translation to English
Google translation to English
 |
 |
Am 02.11.2010 habe ich die lang ersehnte, neue Montierung "Omegon Taurus GM-60" geliefert bekommen.
Sie hat ab diesem Tag ihren Platz auf der verlängerten Säule in meiner Dachsternwarte eingenommen.
Sie ersetzt die originale LX200GPS-Gabelmontierung. Mit dem anfangs aufgesetzten 10" SC-Tubus war die Montierung deutlich unterfordert.
Mittlerweile trägt die Montierung einen MEADE 14" ACF-Tubus. Zum Ausgleich werden 4 Stück 10kg-Gegengewichte benötigt.
Meine Montierung hat die Seriennummer "1234", diese ist auf der Rot eloxierten Abdeckplatte eingraviert (siehe Bild).

Abdeckplatte mit Schriftzug, Anschluss-Buchse und Seriennummer
Nach längerer Wartezeit hat mir Achim Mros (vom Astroshop)
die Montierung persönlich geliefert. Freudestrahlend hat er mir
die Teile übergeben (Montierung mit Stativplatte, Gegengewichtsstange, Gegengewichte, FS2-Steuerung, Splitterbox mit Anschlusskabel).
Einen Säulenadapter aus Stahlrohr mit Flanschplatten ließ ich mir im Vorfeld von der Firma
Metallbau und Schlosserei Wagner in Kaufering anfertigen.
Ich konnte die Montierung bereits mehrmals bei Ausstellungen und Messen ansehen. Aber wenn die eigene geliefert wird, ist das ein besonderer
Moment. Die Verarbeitungsqualität ist exzellent. Alle Teile sind in höchster Genauigkeit CNC-gefräst, Bohrungen und
Gewindelöcher sind exakt und passgenau. Sogar die Abdeckschalen der Stirnradgetriebe (vom Motor zur Schnecke) sind mit Passstiften versehen
und die Berührungsflächen sind eingefettet. Da kann kein noch so kleines Staubkörnchen eindringen. Überhaupt sind alle
sich berührenden Teile gefettet (Gehäuseteile, Schrauben, Gewindebolzen, die Kipp-Hebel, usw.). Alles wirkt sehr solide, nirgendwo
entsteht der Eindruck, dass etwas instabil oder wackelig wäre. Es gibt keine Teile aus Kunststoff, auch die beiden kräftigen Haltegriffe
sind aus pulverbeschichtetem Aluminium. Alle Schrauben sind aus Edelstahl.
Wie das mitgelieferte Messprotokoll zeigt, hält die Montierung die versprochene
Genauigkeit ein, bzw. übertrifft sie noch. Das ist eine Meisterleistung des deutschen Maschinenbaus.
Anfangs fehlten noch zwei Zusatzteile, nämlich die MEADE-Schwalbenschwanzschiene und die Omegon 3"-Prismenklemme,
weshalb ich den Tubus nicht gleich montieren konnte. Zunächst testete ich die Montierung ohne Teleskop. Die von
Michael Koch (Astro Electronic) vorgeschlagenen Motorparameter hatte ich in der FS2-Steuerung eingestellt.
Nach Anschluss der FS2 an die Montierung über die Splitterbox stellte ich fest, dass bei normaler Nachführgeschwindigkeit der RA-Motor
ein tackendes oder klopfendes Geräusch mit etwa zwei "Schlägen" pro Sekunde erzeugte. Die Schläge waren regelrecht
fühlbar. Ich konnte das Phänomen abstellen, indem ich den Motorstrom M1_Str1 von 0,9A auf 0,6A abgesenkte. Die höheren
Geschwindigkeiten funktionieren dagegen von Anfang an einwandfrei. Nach Lieferung der MEADE-Schwalbenschwanzschiene bohrte ich vier Löcher
(Ø8,5mm) hinein, um die Schiene direkt an den Montierungskopf zu schrauben.
Das Novemberwetter ließ nur zwei Abende zu, an denen ich die Montierung ausprobieren und einsetzen konnte.
Am 13.11.2010 hatte ich den 10" SC-Tubus an der Montierung befestigt und mit den beiden 10kg Gegengewichten ausbalanciert.
Nach Einbruch der Dunkelheit wollte ich mit dem Einscheinern beginnen. Als erstes zeigte sich, dass die Montierung nicht in
Sterngeschwindigkeit nachführte, obwohl ein leises Motorengeräusch vernehmbar war. Der eingestellte Stern sauste
ungebremst aus dem Gesichtsfeld der Kamera (DMK 21AU04.AS).
Der zuerst abgesenkte Motorstrom war zu klein, der Motor drehte sich also gar nicht.
Nach Anhebung auf M1_Str1=1,6A lief die Nachführung einwandfrei und ohne Klopfen. Jetzt konnte das Scheinern beginnen.

Montierung mit 10" SC-Teleskop und Gegengewichten
Am 05.02.2011 wurde der neue 14"ACF-Tubus auf die Montierung gesetzt. Die Klemmung erfolgt über die Omegon 3" Schwalbenschwanzklemme.
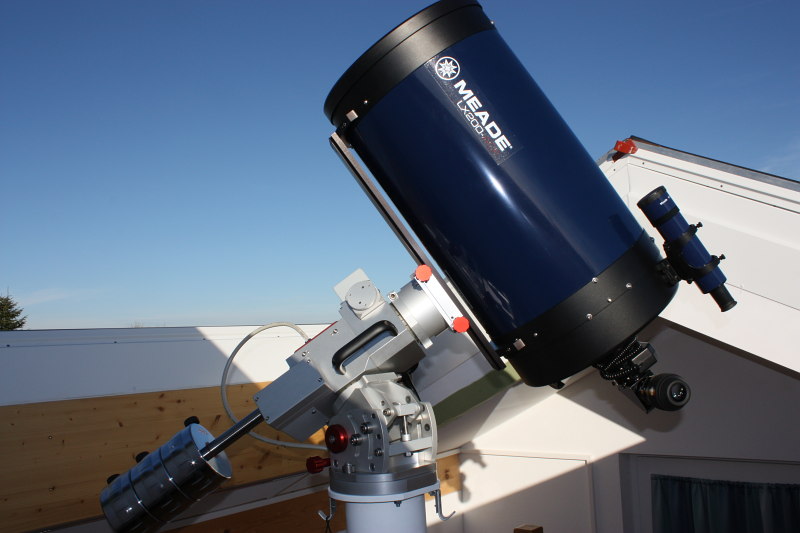
Montierung mit 14" ACF-Teleskop und Gegengewichten (eins fehlt noch)
Zum Scheinern verwendete ich die DMK 21AU04.AS-Kamera im Fokus des 10" SC-Tubus bei ca. 2500mm Brennweite. Im Aufnahmeprogramm, ich verwende
Lucam Recorder hatte ich mir ein Fadenkreuz eingeblendet.
Die Verstellung in Azimut wird durch Feingewindebolzen sehr feinfühlig erreicht (siehe Bild).
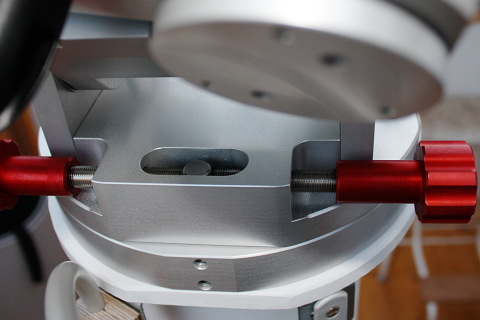
Feingewindebolzen drücken auf einen "Azimutpin",
der fest in einer Passung (Ø12H7) in der Stativplatte steckt.
Der Verstellweg betrug zum Schluss nur noch Zehntel-Millimeter, trotzdem gelang
die Justage mit Leichtigkeit. Beim Festziehen der Klemmschrauben hat sich der Stern nur wenig von der Bildmitte wegbewegt.
Auch die Einstellung der Polhöhe gelang genauso unproblematisch. Die Grad-Skala an der Montierung, die durch ein Loch sichtbar ist,
dient als grobe Orientierung. Auch hier bleibt der Stern beim Festziehen der Klemmschrauben nahe der Bildmitte. Die ganze Prozedur hat
ca. vier Stunden gedauert. Die Mühe hat sich jedoch gelohnt, so exakt hatte ich mein Teleskop noch nie ausgerichtet.
Im Anschluss an die genaue Ausrichtung habe ich gleich noch eine Driftmessung durchgeführt. Das geht am einfachsten mit der
Software K3CCDTools.
Dabei werden die Abweichungen des Sterns von der Anfangsposition in Bogensekunden erfasst
und über der Zeit aufgetragen. Voraussetzung sind die vorherigen Einstellungen zum Teleskop (Brennweite) und zur Kamera
(Pixelgröße, Chipgröße) im Programm. Leider war die Einstellung der Teleskop-Brennweite nicht ganz exakt, so dass der
gemessene Fehler größer erschien, als er war. Die tatsächliche Brennweite beträgt 2700mm anstatt 2500mm. Das ließ
sich mit der Software Astrometrica aus Aufnahmen bestimmen.
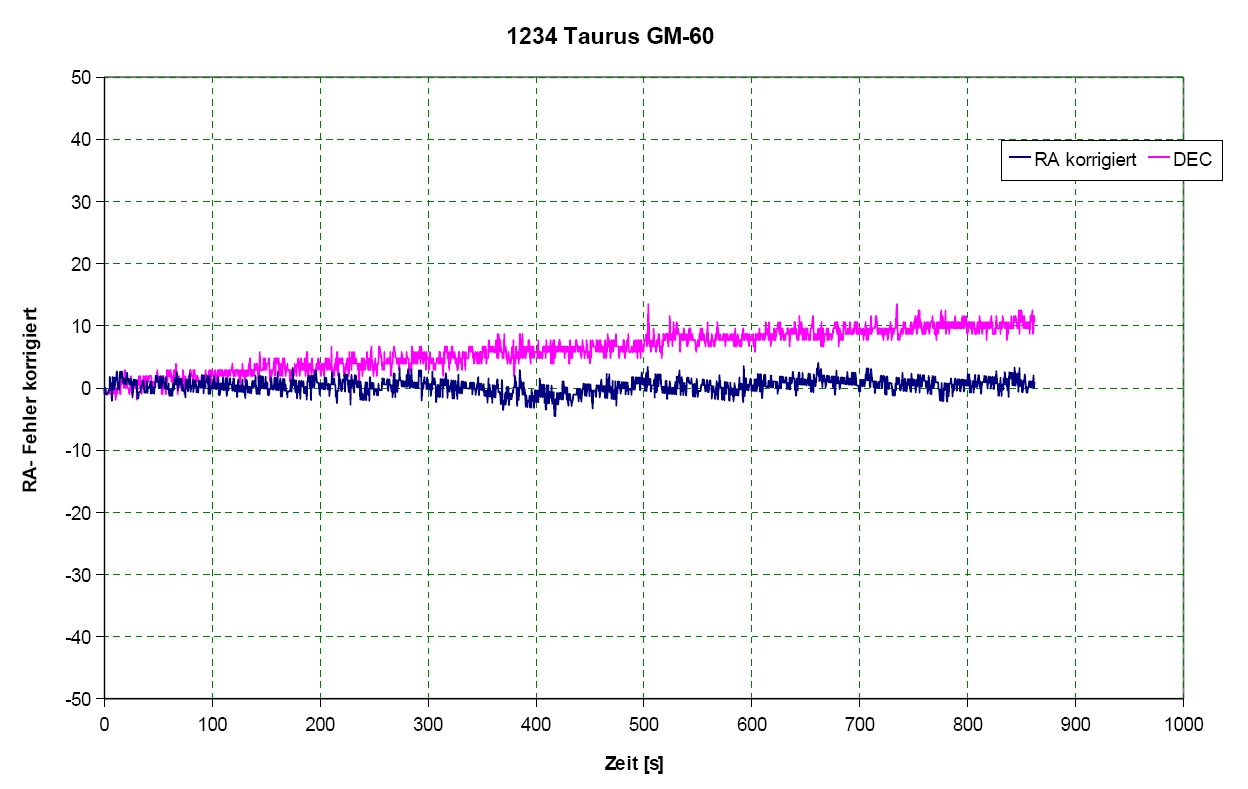
Periodischer Fehler in RA (blaue Kurve) aus dem mitgelieferten Messprotokoll, anklicken zum Vergrößern.
Im Anschluss an Ausrichtung und Driftmessung belichtete ich erste Aufnahmen mit meiner CCD-Kamera PlatinumXL.
Als Objekt wählte ich recht zufällig eine Galaxie im Sternbild Stier (NGC1474). Ich belichtete 17 Bilder zu je 120s bei 2x2 Binning.
Welch ein Unterschied zur vorherigen Situation. Die Montierung läuft wirklich sehr exakt, ich bekomme endlich runde Sterne und ich kann alle Rohbilder verwenden!
Und das ohne PEC und ohne Autoguiding!
Dasselbe Teleskop in der Original-Gabelmontierung erlaubte eine maximale Belichtungszeit von 30s und eine Verwendungsrate von höchstens
50%. Da die Kamera ca. 20s zum Initialisieren und Auslesen eines Bildes benötigt, ergibt sich ein Zeitaufwand von etwa 50s für ein Rohbild. D.h.
wenn man Dark- und Flat-Aufnahmen mitrechnet bekam ich in 2h Zeitaufwand nur 30min reale Belichtungszeit zusammen. Und dabei hatte ich immernoch
längliche Sternabbildungen.
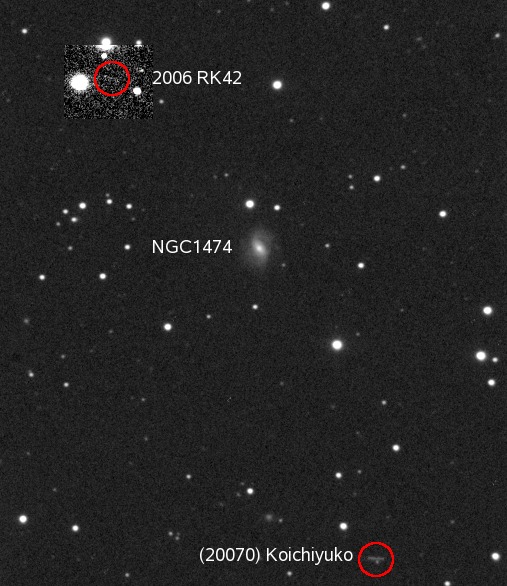
Galaxie NGC1474, 14.11.2010 01:29 - 02:10 Uhr MESZ, 10" SC-Teleskop, 17x120s belichtet, 2x2 Binning; Es konnten zwei Kleinplaneten identifiziert werden: (20070) Koichiyuko mit 16,8mag und das Objekt 2006RK42 mit 20.5mag!
Aufnahme mit dem neuen 14"ACF-Teleskop:

Galaxie M66, 06.02.2011 00:42 - 01:28 Uhr MESZ, 14"ACF-Teleskop, 38x60s belichtet, 2x2 Binning, Alan-Gee TK, Effektivbrennweite: 2425mm (=0,68x), Norden ist rechts
Die Taurus GM 60 bietet eine außerordentlich hohe Stabilität. Das zeigt sich z. B. beim Fokussieren. Ein Stern im Livebild der DMK 21AU04.AS-Kamera
bleibt ganz ruhig, während ich am Fokusknopf drehe. Ich war beeindruckt, das hatte ich nicht erwartet. Ich hatte Bedenken, dass das Gesamtsystem zum Schwingen
neigen könnte, da die Säule mit Aufsatzstück insgesamt 2,40m lang ist. Es ist sehr stabil, man muss schon mit dem Handballen gegen die Säule schlagen, ein Antippen mit den
Fingern genügt nicht, um Schwingungen zu provozieren.
Dasselbe Teleskop in der Original-Gabelmontierung zeigte
beim vorsichtigen Fokussieren heftige Zitterbewegungen, wobei der Stern im Live-Bild Schleifen vollführte oder zueinem großen unscharfen Fleck verschwamm.
Unlängst hatte mal jemand behauptet, dass der vergleichsweise große Abstand zwischen RA-Achse und Teleskopaufnahme der Stabilität abträglich sei.
Im Vergleich zu anderen Montierungen, z.B. der Gemini G42 mag das so erscheinen, aber die Stabilität wird dadurch nicht beeinträchtigt; ich habe sogar einen Vorteil davon.
Ich kann das Teleskop auf der Nordseite durchschwenken, ohne dass es an der Säule anstößt.
Mit dem 14"ACF-Tubus hat sich die Schwingungsanfälligkeit des Gesamtsystems (Säule, Montierung, Teleskop) etwas vergrößert.
Der Schwerpunkt liegt deutlich weiter oben. Wenn das Teleskop in Richtung Osten oder Westen zeigt und sich am höchsten Punkt befindet, entsteht
eine Resonanzfrequenz und das Gesamtsystem wird schwingungsanfällig. In der Nähe des Meridians passiert das nicht. Das liegt aber nicht
an der Montierung, sondern an der großen Masse (Teleskop + Gegengewichte) und der langen Säule. Die Montierung trägt die Masse
immer noch mit Leichtigkeit.
Zur Verringerung der Resonanz-Schwingneigung bin ich eher durch Zufall darauf gekommen, einen FS2-Parameter zu verändern. Der Wert für den RA-Motor M1_F*4 wurde auf 9% gesetzt.
Damit schwingt es weniger und das Motorengeräusch verändert sich etwas von pfeifend nach sonor.
Wenn die Montierung fest aufgestellt ist, wie in meiner Sternwarte, beschränkt sich die Handhabung auf das Einstellen bzw. Anfahren von Objekten.
Zum Klemmen der Achsen in RA und DEC dienen die beiden
Kipp-Hebel
Das ist eine geniale Lösung, da sie durch ihren langen Hebelarm sehr leicht zu betätigen sind, auch mit Handschuhen.
Durch Anheben gegen eine Federkraft lassen sich die Hebel in jede Lage bringen und rasten dort wieder ein. Hier muss man etwas aufpassen,
dass die Hebel nicht beliebig stehen gelassen werden, da sonst ein Risiko des Anstoßens besteht. Die Klemmkraft lässt sich so feinfühlig einstellen,
dass das Teleskop leicht von Hand geschwenkt werden kann, ohne dass es z.B. durch geringe Imbalance von selbst schwenkt. Verwendet man ausschliesslich die
GOTO-Funktion, können beide Achsen geklemmt bleiben.
Die Montierung ist mit hochpräzisen Encodern (2500 Strich) in beiden Achsen ausgestattet. Dadurch bleibt die Koordinaten-Information in der FS2-Steuerung erhalten, auch wenn die
Achsklemmung gelöst und das Teleskop von Hand bewegt wird. Die Genauigkeit der Koordinaten-Information aus den Encodern ist etwas geringer, als wenn die
Montierung immer geklemmt bliebe. Man kann dies anhand einer Formel (siehe FAQ Nr. 7 zur FS2) berechnen. Bei 2500 Strichen ergibt sich
eine Winkelauflösung von 129,6 Bogensekunden (=2' 9,6").
Beim GOTO-Betrieb gibt es noch ein Problem, wenn die Encoder in der FS2 eingeschaltet sind. Dann fährt die Montierung zwar in die richtige Richtung,
verlangsamt dann die Fahrt und schwenkt langsam in wechselnden Richtungen weiter. Das Teleskop zeigt dabei mehrere Grad daneben. Man muss die Bewegung mit
einem Tastendruck abbrechen. Die Ursache dieses Effektes ist mir noch nicht klar. Vermutlich sind es falsche Einstellungen in der FS2.
Wenn ich die Encoder ausschalte, funktioniert die GOTO-Funktion einwandfrei und mit höchster Präzision. Allerdings darf ich dann die
Achsklemmung nicht lösen.
Die FS2-Einstellungen sind richtig. In Zusammenarbeit mit Astroshop, dem Montierungs-Hersteller und Michael Koch (Astro Electronic) wurden viele Tests
und Überprüfungen durchgeführt. Der Fehler konnte inzwischen gefunden werden, er wird vom Hersteller beseitigt.
Positiv ist anzumerken, dass die Montierung über die Splitterbox mit nur einem Kabel abgeschlossen wird. Dabei sind in diesem Kabel alle
Leitungen für die Schrittmotoren und die Signalleitungen der Encoder zusammengefasst. Vertauschungen oder "Kabelsalat" wird vermieden.
Allerdings befindet sich der Anschluss an der Oberseite
des RA-Gehäuses in der Rot eloxierten Platte (siehe Bild oben). Wünschenswert wäre der Kabelanschluss an einem nicht bewegten Teil mit
Leitungs-Durchführung durch die RA-Achse, da das ziemlich dicke Kabel sonst beim Schwenken u.U. stört. Ich habe es an der Säule befestigt und führe es in
einem Bogen zur Montierung. So habe ich eine ziemlich große Schwenkfreiheit.
|
|
|
Die Beschreibungen der einzelnen Parameter findet man in der FS2-Anleitung in Kap. 6.2.
Über das kleine Windows-Programm FS2setup
von Adriano Palenga
kann man die folgende txt-Datei
in die FS2 laden. Damit erspart man sich das mühevolle Eingeben jedes einzenen Wertes. Den Downloadlink des FS2Setup-Programms findet man auch auf der
Astro Electronic-Webseite unter "Neue FS2 Software-Versionen"
Zum Antrieb in RA und DEC werden High-Torque Schrittmotoren vom Typ SECM264-E2.0A mit 1,8° pro Vollschritt verwendet. Hersteller der Motoren ist die Firma
EC Motion GmbH. Infos und Datenblätter sind unter den folgenden Links
erhältlich:
Die Planetengetriebe stammen vom Hersteller Neugart GmbH. Es handelt sich um
zweistufige Getriebe vom Typ PLE-40 mit einer 40-fachen Untersetzung. Unter den folgenden Links finden sich entsprechende Produktinfos:
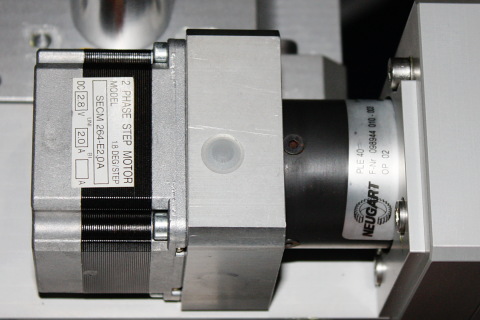


Gehäuseschale entfernt: Schrittmotor mit Planetengetriebe, Typenschilder
Zur Erfassung des Drehwinkels enthält die Montierung hochpräzise Encoder von US Digital
mit 2500 Strich. Die Encoder sind direkt auf der Achse montiert und erreichen eine Winkelauflösung von 129,6 Bogensekunden (=2' 9,6").
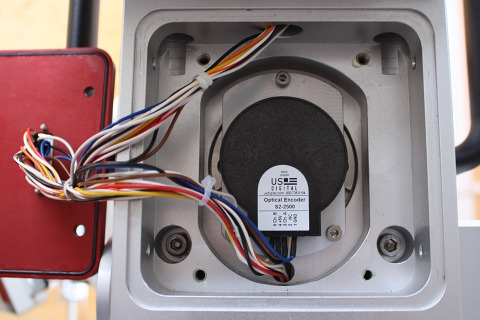

Blick auf den RA-Encoder unter der roten Abdeckplatte, Typenschild
[ Stand: 25.10.2016 |  Gregor Krannich
| Gregors Astronomieseite ]
Gregor Krannich
| Gregors Astronomieseite ]